- 机械运动(I)机械运动(I)
- 长度的国际单位长度的国际单位
- 常见物体长度的估测常见物体长度的估测
- 长度单位的换算长度单位的换算
- 用刻度尺测量长度用刻度尺测量长度
- 物体长度的读数物体长度的读数
- 用螺旋测微计测长度用螺旋测微计测长度
- 多次测量取平均值多次测量取平均值
- 用游标卡尺测长度用游标卡尺测长度
- 长度的特殊测量--累积法长度的特殊测量--累积法
- 长度的特殊测量--配合法长度的特殊测量--配合法
- 机械运动(II)机械运动(II)
- 停表的读数停表的读数
- 误差与错误误差与错误
- 参照物参照物
- 物体运动情况的判断物体运动情况的判断
- 古诗中的参照物古诗中的参照物
- 比较物体运动快慢的两种方法比较物体运动快慢的两种方法
- 常见物体的速度及速度大小的比较常见物体的速度及速度大小的比较
- 瞬时速度与平均速度瞬时速度与平均速度
- 频闪照相分析运动状态频闪照相分析运动状态
- 行程问题行程问题
- 直线运动s-t 图象v-t图象直线运动s-t 图象v-t图象
- 行程问题的综合计算行程问题的综合计算
- 测量物体运动的平均速度测量物体运动的平均速度
- 平均速度的计算平均速度的计算
- 声现象声现象
- 声音是由物体振动产生的声音是由物体振动产生的
- 声音的传播需要介质声音的传播需要介质
- 不同物体的传声效果不同不同物体的传声效果不同
- 回声现象回声现象
- 回声测距回声测距
- 关于声速的综合计算关于声速的综合计算
- 音调(声波、超声波、次声波)音调(声波、超声波、次声波)
- 响度响度
- 音色音色
- 响度音调音色的辨析响度音调音色的辨析
- 声音的利用声音的利用
- 噪声的定义及防治噪声的定义及防治
- 物态变化(I)物态变化(I)
- 温度的概念温度的概念
- 温度及其估测温度及其估测
- 三种温标三种温标
- 热传递热传递
- 温度计的原理温度计的原理
- 温度计的使用(普通温度计和体温计)温度计的使用(普通温度计和体温计)
- 温度计的读数温度计的读数
- 不准的温度计不准的温度计
- 熔化的定义,熔化曲线及吸放热特点熔化的定义,熔化曲线及吸放热特点
- 凝固的定义,凝固曲线及吸放热特点凝固的定义,凝固曲线及吸放热特点
- 熔化和凝固的特点的应用熔化和凝固的特点的应用
- 熔化和凝固的条件的应用熔化和凝固的条件的应用
- 物态变化(II)物态变化(II)
- 汽化的两种形式汽化的两种形式
- 沸腾现象及其特点沸腾现象及其特点
- 沸点的影响因素沸点的影响因素
- 沸腾的条件沸腾的条件
- 蒸发现象及其特点蒸发现象及其特点
- 影响蒸发快慢的因素的应用影响蒸发快慢的因素的应用
- 液化的两种方式及其特点液化的两种方式及其特点
- “白气”现象“白气”现象
- 升华、凝华现象及其特点升华、凝华现象及其特点
- 升华和凝华现象辨析升华和凝华现象辨析
- 物态变化综合辨析物态变化综合辨析
- 光现象(I)光现象(I)
- 光源光源
- 光在均匀介质中沿直线传播光在均匀介质中沿直线传播
- 日食日食
- 小孔成像小孔成像
- 光速光速
- 光速的测量光速的测量
- 探究光的反射规律探究光的反射规律
- 入射角与反射角的计算入射角与反射角的计算
- 光的反射作图光的反射作图
- 镜面反射和漫反射镜面反射和漫反射
- 光现象(II)光现象(II)
- 平面镜成像的特点平面镜成像的特点
- 物距等于像距的简单计算物距等于像距的简单计算
- 平面镜成像作图平面镜成像作图
- 平面镜与球面镜平面镜与球面镜
- 光的折射光的折射
- 光的折射规律的应用光的折射规律的应用
- 光的折射作图光的折射作图
- 光的折射作图(进阶)光的折射作图(进阶)
- 光的折射现象辨析光的折射现象辨析
- 全反射全反射
- 光的色散光的色散
- 物体的颜色物体的颜色
- 红外线和紫外线红外线和紫外线
- 透镜及其应用透镜及其应用
- 透镜的种类透镜的种类
- 焦点、焦距、主光轴焦点、焦距、主光轴
- 凸透镜对光线有会聚的作用凸透镜对光线有会聚的作用
- 凹透镜对光线有发散的作用凹透镜对光线有发散的作用
- 凸透镜三条特殊的光线凸透镜三条特殊的光线
- 凹透镜三条特殊的光线凹透镜三条特殊的光线
- 凸透镜成像规律的实验凸透镜成像规律的实验
- 凸透镜成像作图凸透镜成像作图
- 凸透镜成像计算凸透镜成像计算
- 凸透镜成像公式凸透镜成像公式
- 照相机原理照相机原理
- 投影仪的成像原理及特点投影仪的成像原理及特点
- 放大镜原理放大镜原理
- 近视眼与远视眼近视眼与远视眼
- 眼镜的度数眼镜的度数
- 显微镜显微镜
- 望远镜望远镜
- 质量质量
- 质量的概念和单位质量的概念和单位
- 估测常见物体的质量估测常见物体的质量
- 质量是物体的固有属性质量是物体的固有属性
- 天平的使用天平的使用
- 天平的误差分析天平的误差分析
- 密度密度
- 密度的概念及公式密度的概念及公式
- 密度的单位与换算密度的单位与换算
- 质量和密度的概念辨析质量和密度的概念辨析
- 密度的计算之--知二求一密度的计算之--知二求一
- 密度的计算之--小样问题密度的计算之--小样问题
- 密度的计算之--空心问题密度的计算之--空心问题
- 密度的计算之--比值问题密度的计算之--比值问题
- 密度的计算之--冰十水九密度的计算之--冰十水九
- 密度的计算之--平均密度密度的计算之--平均密度
- 密度的图象(m-V图象)密度的图象(m-V图象)
- 量筒的使用和读数量筒的使用和读数
- 排液法测体积排液法测体积
- 测量固体的密度测量固体的密度
- 测量液体的密度测量液体的密度
- 等质量法测密度--天平(没砝码) 、量筒等质量法测密度--天平(没砝码) 、量筒
- 等体积法测密度--只有天平(有砝码)等体积法测密度--只有天平(有砝码)
- 密度与温度密度与温度
- 力力
- 力的概念及单位力的概念及单位
- 力的作用效果力的作用效果
- 力的三要素力的三要素
- 力的表示力的表示
- 力的作用是相互的力的作用是相互的
- 放大法研究微小形变放大法研究微小形变
- 弹力弹力
- 弹力的大小(胡克定律)弹力的大小(胡克定律)
- 弹簧测力计的原理、使用及误差分析弹簧测力计的原理、使用及误差分析
- 重力的定义重力的定义
- 重力的方向、作图及应用重力的方向、作图及应用
- 探究重力的大小跟质量的关系探究重力的大小跟质量的关系
- 重力与质量的辨析及计算重力与质量的辨析及计算
- 重心重心
- 运动和力运动和力
- 探究阻力对物体运动的影响探究阻力对物体运动的影响
- 牛顿第一定律牛顿第一定律
- 惯性及其大小惯性及其大小
- 解释生活中的惯性现象解释生活中的惯性现象
- 探究影响物体的平衡的条件探究影响物体的平衡的条件
- 区别平衡力和相互作用力区别平衡力和相互作用力
- 二力平衡的计算二力平衡的计算
- 合力、分力的概念(等效替代的思想)合力、分力的概念(等效替代的思想)
- 同一直线上的二力合成法则同一直线上的二力合成法则
- 同一直线上二力合成的应用同一直线上二力合成的应用
- 互成角度的二力合成互成角度的二力合成
- 摩擦力及其分类摩擦力及其分类
- 影响摩擦力大小的因素影响摩擦力大小的因素
- 增大与减小摩擦力的方法增大与减小摩擦力的方法
- 影响摩擦力大小因素的应用影响摩擦力大小因素的应用
- 判断摩擦力是否存在判断摩擦力是否存在
- 利用二力平衡求摩擦力利用二力平衡求摩擦力
- 多状态平衡求摩擦力多状态平衡求摩擦力
- 压强(I)压强(I)
- 压力的示意图压力的示意图
- 压力与重力、支持力的辨析压力与重力、支持力的辨析
- 探究压力作用效果的影响因素探究压力作用效果的影响因素
- 压强的定义、公式、单位、估算压强的定义、公式、单位、估算
- 固体压强计算--知二求一固体压强计算--知二求一
- 固体压强计算--柱体压强固体压强计算--柱体压强
- 固压切割模型固压切割模型
- 固压叠加模型固压叠加模型
- 固体压强的计算综合固体压强的计算综合
- 增大和减小固体压强的方法增大和减小固体压强的方法
- 压强(II)压强(II)
- 液体压强的产生原因液体压强的产生原因
- 探究液体压强的特点探究液体压强的特点
- 液体压强的计算(p=ρgh)液体压强的计算(p=ρgh)
- 液体压强大小比较液体压强大小比较
- 三种常见容器三种常见容器
- 台型容器问题台型容器问题
- 固压液压的计算固压液压的计算
- 帕斯卡定律帕斯卡定律
- 连通器的定义及其特点连通器的定义及其特点
- 生活中的连通器生活中的连通器
- 连通器的计算连通器的计算
- 大气压强存在的实验及现象大气压强存在的实验及现象
- 大气压强的产生原因及影响因素大气压强的产生原因及影响因素
- 托里拆利实验托里拆利实验
- 大气压强的特殊测量大气压强的特殊测量
- 高压锅限压阀的受力分析高压锅限压阀的受力分析
- 气体压强、液体压强的平衡气体压强、液体压强的平衡
- 流体流速和压强的关系流体流速和压强的关系
- 浮力浮力
- 浮力定义及方向浮力定义及方向
- 浮力的本质浮力的本质
- 探究浮力的大小跟哪些因素有关探究浮力的大小跟哪些因素有关
- 阿基米德原理(实验验证)阿基米德原理(实验验证)
- 对阿基米德原理的理解对阿基米德原理的理解
- 阿基米德原理的简单计算阿基米德原理的简单计算
- 阿基米德原理的综合计算阿基米德原理的综合计算
- 物体的浮沉条件物体的浮沉条件
- 利用浮沉条件求浮力利用浮沉条件求浮力
- 利用浮沉条件比较浮力大小利用浮沉条件比较浮力大小
- 浮力的应用之轮船问题浮力的应用之轮船问题
- 浮力的应用之空气浮力浮力的应用之空气浮力
- 浮力的应用之密度计浮力的应用之密度计
- 浮力的应用之潜水艇浮力的应用之潜水艇
- 利用浮力称量法测密度利用浮力称量法测密度
- 利用图象解决浮力计算利用图象解决浮力计算
- 功和功率功和功率
- 功的定义功的定义
- 不做功的三种情况不做功的三种情况
- 比较做功的大小比较做功的大小
- 功的简单计算(一)功的简单计算(一)
- 功的简单计算(二)功的简单计算(二)
- 功的间接计算功的间接计算
- 功的计算之竖拉滑轮人站地功的计算之竖拉滑轮人站地
- 功的计算之竖拉滑轮人站箱功的计算之竖拉滑轮人站箱
- 功的计算之横拉滑轮功的计算之横拉滑轮
- 功率的定义功率的定义
- 功率公式功率公式
- 功率的简单计算(P=W/t)功率的简单计算(P=W/t)
- 功率公式变形P=Fv的应用功率公式变形P=Fv的应用
- 滑轮组中功率的计算滑轮组中功率的计算
- 功和功率的综合计算功和功率的综合计算
- 动能和势能动能和势能
- 动能及其决定因素动能及其决定因素
- 影响动能大小的因素影响动能大小的因素
- 判断动能的变化判断动能的变化
- 蹦极中的动能变化蹦极中的动能变化
- 重力势能及其决定因素重力势能及其决定因素
- 影响重力势能大小的因素影响重力势能大小的因素
- 判断重力势能的变化判断重力势能的变化
- 机械能的概念机械能的概念
- 判断机械能的变化判断机械能的变化
- 动能与重力势能的转化动能与重力势能的转化
- 水能和风能的利用水能和风能的利用
- 杠杆杠杆
- 杠杆的定义及五要素杠杆的定义及五要素
- 力臂的画法力臂的画法
- 探究杠杆的平衡条件探究杠杆的平衡条件
- 区分省力杠杆、费力杠杆、等臂杠杆区分省力杠杆、费力杠杆、等臂杠杆
- 杠杆平衡的单状态计算(知三求一)杠杆平衡的单状态计算(知三求一)
- 杠杆平衡的多状态计算杠杆平衡的多状态计算
- 杠杆的二次平衡杠杆的二次平衡
- 杠杆的二次平衡进阶杠杆的二次平衡进阶
- 杠杆平衡中的最小力问题杠杆平衡中的最小力问题
- 杠杆平衡中的变化力问题杠杆平衡中的变化力问题
- 杠杆和固体压强的综合杠杆和固体压强的综合
- 利用杠杆测密度利用杠杆测密度
- 杠杆和液体压强、浮力的综合杠杆和液体压强、浮力的综合
- 杠杆的多支点问题杠杆的多支点问题
- 滑轮滑轮
- 滑轮的定义及分类滑轮的定义及分类
- 定滑轮和动滑轮特点定滑轮和动滑轮特点
- 滑轮的本质滑轮的本质
- 滑轮组的绕线方式滑轮组的绕线方式
- 滑轮组的受力分析(一根绳子)滑轮组的受力分析(一根绳子)
- 滑轮组的受力分析n△F=△G滑轮组的受力分析n△F=△G
- 滑轮组的受力分析(多根绳子)滑轮组的受力分析(多根绳子)
- 横拉滑轮的受力分析横拉滑轮的受力分析
- 滑轮组与压强浮力的综合计算滑轮组与压强浮力的综合计算
- 滑轮组的受力分析之人站箱问题滑轮组的受力分析之人站箱问题
- 机械效率机械效率
- 机械效率的定义及表达式机械效率的定义及表达式
- 功的原理功的原理
- 机械效率和功率的概念辨析机械效率和功率的概念辨析
- 斜面机械效率的简单计算斜面机械效率的简单计算
- 滑轮机械效率的简单计算滑轮机械效率的简单计算
- 测量滑轮组机械效率测量滑轮组机械效率
- 机械效率的公式推导G/Nf机械效率的公式推导G/Nf
- 机械效率的公式推导G/G+G0机械效率的公式推导G/G+G0
- 滑轮组机械效率的综合计算滑轮组机械效率的综合计算
- 复杂滑轮组的机械效率的计算复杂滑轮组的机械效率的计算
- 内能内能
- 分子动理论分子动理论
- 分子动理论的辨析分子动理论的辨析
- 扩散现象扩散现象
- 扩散现象的辨析扩散现象的辨析
- 内能的概念及影响因素内能的概念及影响因素
- 内能的改变方式内能的改变方式
- 内能改变方式的辨析内能改变方式的辨析
- 温度、热量与内能概念辨析温度、热量与内能概念辨析
- 比热容的定义比热容的定义
- 探究物质的吸热能力的实验探究物质的吸热能力的实验
- 比热容在生活中的应用比热容在生活中的应用
- 比热容的简单计算比热容的简单计算
- 比热容的综合计算比热容的综合计算
- 内能的利用内能的利用
- 热机的分类及能量转化热机的分类及能量转化
- 四冲程汽油机四冲程汽油机
- 柴油机和汽油机的构造对比柴油机和汽油机的构造对比
- 热值的定义、单位及计算公式热值的定义、单位及计算公式
- 热值理解及简单计算热值理解及简单计算
- 热机的综合计算热机的综合计算
- 热机效率热机效率
- 能量的转化与能量守恒定律能量的转化与能量守恒定律
- 电流和电路电流和电路
- 原子结构原子结构
- 摩擦起电摩擦起电
- 电荷与电荷间的相互作用电荷与电荷间的相互作用
- 验电器验电器
- 导体与绝缘体导体与绝缘体
- 电流的形成与电流方向电流的形成与电流方向
- 电流大小及其计算电流大小及其计算
- 电路构成及元件作用电路构成及元件作用
- 电路图和实物图的相互转化电路图和实物图的相互转化
- 电路的三种状态电路的三种状态
- 串并联电路的识别串并联电路的识别
- 串并联电路的特点串并联电路的特点
- 电路设计电路设计
- 电流表的使用电流表的使用
- 串并联电路的电流特点串并联电路的电流特点
- 含电流表的电路分析含电流表的电路分析
- 电压和电阻电压和电阻
- 电压的概念、单位及换算电压的概念、单位及换算
- 电压的概念辨析电压的概念辨析
- 电压表的使用电压表的使用
- 电压表的测量对象电压表的测量对象
- 探究串并联电路的电压的特点探究串并联电路的电压的特点
- 串联电路的电压计算串联电路的电压计算
- 并联电路的电压计算并联电路的电压计算
- 等效电路图画法等效电路图画法
- 电阻的概念,单位及换算、常见物体的电阻电阻的概念,单位及换算、常见物体的电阻
- 影响电阻大小因素的实验影响电阻大小因素的实验
- 影响电阻大小的因素影响电阻大小的因素
- 滑动变阻器滑动变阻器
- 电阻箱的读数电阻箱的读数
- 含电压表、电流表电路的分析与计算含电压表、电流表电路的分析与计算
- 欧姆定律(I)欧姆定律(I)
- 欧姆定律的概念辨析欧姆定律的概念辨析
- 欧姆定律的简单计算--知二求一欧姆定律的简单计算--知二求一
- 欧姆定律U-I图象欧姆定律U-I图象
- 串并联电路的等效电阻串并联电路的等效电阻
- 欧姆定律I-R图象欧姆定律I-R图象
- 复杂电路的等效电阻的计算复杂电路的等效电阻的计算
- 串联分压并联分流规律串联分压并联分流规律
- 欧姆定律在串并联电路中的简单应用欧姆定律在串并联电路中的简单应用
- 欧姆定律(II)欧姆定律(II)
- 伏安法测电阻伏安法测电阻
- 单安法测电阻单安法测电阻
- 单伏法测电阻单伏法测电阻
- 电表示数变化电表示数变化
- 动态电路△U与△I动态电路△U与△I
- △U与△I的计算△U与△I的计算
- △U-△I曲线△U-△I曲线
- 电路变化最值问题电路变化最值问题
- 电路故障电路故障
- 欧姆定律综合计算之单状态欧姆定律综合计算之单状态
- 欧姆定律综合计算之多状态欧姆定律综合计算之多状态
- 电功率(I)电功率(I)
- 电能的概念、单位及单位换算电能的概念、单位及单位换算
- 电能表的使用及读数电能表的使用及读数
- 电功的物理意义、单位及公式电功的物理意义、单位及公式
- 电功率的单位及公式电功率的单位及公式
- 常见用电器的功率常见用电器的功率
- 电功率的公式变形电功率的公式变形
- 串并联电路中的电功率特点串并联电路中的电功率特点
- 串并联电路中电功与电功率特点的应用串并联电路中电功与电功率特点的应用
- 额定功率与实际功率额定功率与实际功率
- 电功率的简单计算电功率的简单计算
- 电功率的最值问题电功率的最值问题
- 电功率的动态变化电功率的动态变化
- 电功率动态变化之作死问题电功率动态变化之作死问题
- 电功率的比例计算电功率的比例计算
- 电功率的综合计算(一)电功率的综合计算(一)
- 电功率的综合计算(二)电功率的综合计算(二)
- 电功率(II)电功率(II)
- 伏安法测量灯泡电功率伏安法测量灯泡电功率
- 单安法测量灯泡电功率单安法测量灯泡电功率
- 单伏法测量灯泡电功率单伏法测量灯泡电功率
- 电流的热效应电流的热效应
- 探究影响导体产生热量的因素探究影响导体产生热量的因素
- 焦耳定律的公式推广及其简单计算焦耳定律的公式推广及其简单计算
- 焦耳定律实验的应用焦耳定律实验的应用
- 焦耳定律的综合计算焦耳定律的综合计算
- 用电器电路焦耳定律的计算用电器电路焦耳定律的计算
- 生活用电生活用电
- 家庭电路及各部分组成家庭电路及各部分组成
- 测电笔的结构与使用测电笔的结构与使用
- 家庭电路的连接与作图家庭电路的连接与作图
- 家庭电路的故障分析家庭电路的故障分析
- 家庭电路中电流过大的原因家庭电路中电流过大的原因
- 触电及用电安全触电及用电安全
- 电与磁电与磁
- 磁现象及磁极间相互作用磁现象及磁极间相互作用
- 磁场与磁感线磁场与磁感线
- 地磁场地磁场
- 奥斯特实验(电流的磁效应)奥斯特实验(电流的磁效应)
- 安培定则安培定则
- 电磁铁及影响电磁铁磁性强弱的因素电磁铁及影响电磁铁磁性强弱的因素
- 电磁继电器的构造及作用电磁继电器的构造及作用
- 磁场对通电导线的作用、电动机磁场对通电导线的作用、电动机
- 左手定则与右手定则的辨析左手定则与右手定则的辨析
- 电磁感应现象、发电机电磁感应现象、发电机
- 电磁现象综合辨析电磁现象综合辨析
- 信息的传递信息的传递
- 现代顺风耳―电话现代顺风耳―电话
- 电磁波电磁波
- 无线电广播信号的发射和接收无线电广播信号的发射和接收
- 越来越宽的信息之路越来越宽的信息之路
- 能源与可持续发展能源与可持续发展
- 能源及其分类能源及其分类
- 核能核能
- 太阳能太阳能
- 能源的可持续发展能源的可持续发展
《杠杆平衡的多状态计算》杠杆平衡的多状态计算
1单选题
如图所示,质量不计的光滑木板AB长1.2m,可绕固定点O转动,离O点0.2m的B端挂一重物G,板的A端用一根与水平地面成30°夹角的细绳拉住,木板在水平位置平衡时绳的拉力是6N.然后在O点的正上方放一质量为0.3kg的小球,若小球以25cm/s的速度由O点沿木板向A端匀速运动,问小球至少运动多长时间细绳的拉力减小到零.(取g=10N/kg,绳的重力不计)
题目答案
您的答案
答案解析
分析:
当球在O点上方时,杠杆在绳的拉力和G的作用下平衡,确定绳的力臂,根据杠杆平衡条件求出G的大小;
当绳的拉力为零时,则杠杆在小球和G的作用下恰好保持平衡,根据杠杆的平衡条件求出小球对杠杆力的力臂,由速度公式的变形公式可以求出运动时间.
解答:
解:做出拉力的力臂,如图所示: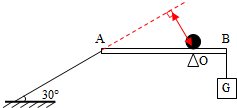
由杠杆平衡条件得:F_绳×AOsin30°=G×BO,
即:6N×$\frac {1}{2}$×(1.2m-0.2m)=G×0.2m,解得:G=15N,
球的重力G_球=m_球g=0.3kg×10N/kg=3N,
当绳子拉力为0时,设球离O点距离为L_球,
由杠杆平衡条件得:G_球×L_球=G×BO,
即:3N×L_球=15N×0.2m,
解得:L_球=1m=100cm,
由速度公式:v=$\frac {s}{t}$可知:
球的运动时间:t=$\frac {L_球}{v_球}$=$\frac {100cm}{25cm/s}$=4s.
答:小球运动4s时绳子拉力为零.
点评:
此题考查了对杠杆平衡条件的应用,掌握二力平衡条件,并正确地确定杠杆所受的力及对应的力臂,求出物体G的重力是解决此题的关键所在.
2单选题
如图所示的杠杆处于平衡状态,若使弹簧秤的示数变为原来的$\frac {1}{2}$,杠杆仍然平衡,可以( )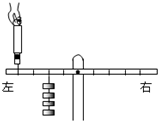
题目答案
您的答案
答案解析
分析:
根据杠杆平衡条件F$_1$L$_1$=F$_2$L$_2$,若使弹黄秤的示数变为原来的二分之一,力臂不变,钩码的重力与力臂的乘积应变为原来的二分之一,可以把重力变为原来的二分之一也可以把力臂变为原来的二分之一.
解答:
解;根据杠杆平衡条件F$_1$L$_1$=F$_2$L$_2$,钩码的重力与力臂的乘积应变为原来的二分之一,可以采取去掉两个钩码或把钩码向右移动一个小格,所以A,B,D错误,C正确.
故选C.
点评:
本题考查学生对杠杆平衡条件的理解并会有效解决实际问题.
3填空题
“塔吊”是建筑工地上普遍使用的一种起重设备,如图所示是“塔吊”的简化图.OB是竖直支架,ED是水平臂,OE段叫平衡臂,E端装有配重体,OD段叫吊臂,C处装有滑轮,可以在OD之间移动.已知OE=10m,OC=15m,CD=10m,若在C点用此塔吊能起吊重物的最大质量是1.5×10_kg,则配重体的质量应为Kg,当滑轮移到D点时能够安全起吊重物的最大质量是Kg.(不计“水平臂”和滑轮重力)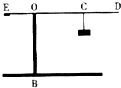
题目答案
您的答案
答案解析
分析:
当重物在C处时,根据杠杆平衡条件求出E端配重体的质量.
当重物在D点时,再次根据杠杆平衡条件求出重物的重.
解答:
解:若在C点用此塔吊能起吊重物的最大质量是1.5×10_kg,
因为,F$_1$l$_1$=F$_2$l$_2$,
所以,mg×10m=1.5×10_kg×g×15m,
所以m=2250kg.
当滑轮移到D点时,吊起重物的质量为m',
所以,2250kg×g×10m=m'×g×(15+10)m,
在D点吊起重物质量m'=900kg.
故答案为:2250;900.
点评:
杠杆平衡条件是解决杠杆平衡问题的重要依据,只要是杠杆平衡,想法找到动力、动力臂、阻力、阻力臂,根据杠杆平衡条件求解,是比较简单的问题.
4单选题
如图,用测力计将长杆一端A微微抬离地面,测力计示数是F$_1$;同理,用测力计将长杆的另一端B微微抬离地面,测力计示数是F$_2$.则长杆的重力是(测力计保持竖直向上)( )
题目答案
您的答案
答案解析
分析:
在杠杆的右端竖直抬起时,B是支点,根据杠杆平衡条件求出拉力和重力的关系;在杠杆的左端竖直抬起时,A是支点,根据杠杆平衡条件求出拉力和重力的关系.
解答:
解:在杠杆的右端竖直抬起时,B是支点,根据杠杆平衡条件得,
F$_1$×AB=G×OB----①
在杠杆的左端竖直抬起时,A是支点,根据杠杆平衡条件得,
F$_2$×AB=G×OA----②
①+②得,
F$_1$+F$_2$=G.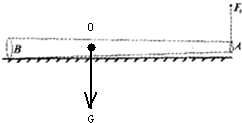
故选B.
点评:
这种方法是测量比较长的物体的重力的一种简单方法.
5单选题
如图所示,质量不计的光滑木板AB长1.2m,可绕固定点O转动,离O点0.4m的B端挂一重物G,板的A端用一根与水平地面成30°夹角的细绳拉住,木板在水平位置平衡时绳的拉力是9N.求:
(1)重物G的重力
(2)若在O点的正上方放一质量为0.6kg的小球,若小球以15cm/s的速度由O点沿木板向A端匀速运动,问小球至少运动多长时间细绳的拉力减小到零.(取g=10N/kg,绳的重力不计)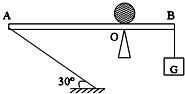
题目答案
您的答案
答案解析
分析:
本题考查力矩平衡,找出拉力的作用线,作出力臂,第一问即可求解,第二问结合了运动学知识,先找出小球到达哪一点能保证力矩平衡,由运动学公式求出时间.
解答:
解:( 1)根据杠杆平衡条件得:F_绳×$\frac {1}{2}$AO=G×BO
1)根据杠杆平衡条件得:F_绳×$\frac {1}{2}$AO=G×BO
即:9N×$\frac {1}{2}$(1.2m-0.4m)=G×0.4m
∴G=9N
(2)球的重力G_球=m_球g=0.6Kg×10N/kg=6N(1分)
当绳子拉力为0时,设球离O点距离为L_球,则根据杠杆平衡条件得:
G_球×L_球=G×BO
即:6N×L_球=9N×0.4m,∴L_球=0.6m=60cm
运动时间t=$\frac {L_球}{V_球}$=$\frac {60cm}{15cm/s}$=4s
答:重物重9N,小球运动4s时绳子拉力为零.
点评:
求力矩平衡的题目找准力臂是关键,应会正确地作出力的作用线进一步长出力臂,本题有同学把拉力的力臂当成AO来求,错在了什么地方?
6单选题
如图所示的杠杆处于平衡状态,若使弹簧秤的示数变为原来的$\frac {1}{2}$,杠杆仍然保持平衡状态,可以采取哪些措施( )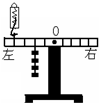
题目答案
您的答案
答案解析
分析:
根据杠杆平衡条件F$_1$L$_1$=F$_2$L$_2$,若使弹黄秤的示数变为原来的1/2,力臂不变,钩码的重力与力臂的乘积应变为原来的二分之一,可以把重力变为原来的二分之一也可以把力臂变为原来的二分之一.
解答:
解;根据杠杆平衡条件F$_1$L$_1$=F$_2$L$_2$,钩码的重力与力臂的乘积应变为原来的二分之一,可以采取去掉两个钩码或把钩码向右移动一个小格,所以A,B,C错误,D正确.
故选D.
点评:
本题考查学生对杠杆平衡条件的理解并会有效解决实际问题.
7单选题
如图甲所示是脚踏式翻盖垃圾桶的实物图,翻盖的原理是由两个杠杆脚踏杆AO$_1$B、桶盖DCO$_2$和轻质硬杆BC组合而成,如图乙所示.桶盖的重力集中作用在桶盖中心D点,脚踏杆和其它连接杆的质量、摩擦不计,脚踏杆AO$_1$=24cm,O$_1$B=18cm,桶盖和连接杆的尺寸如图乙所示.把桶盖顶起,脚对踏板A处的压力至少为21N,则桶盖的质量是( )(g=10N/kg)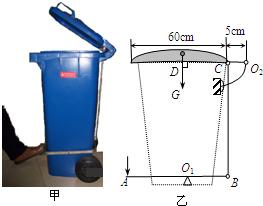
题目答案
您的答案
答案解析
分析:
分析图乙,有两个杠杆AO$_1$B和O$_2$CD,O$_1$和O$_2$,分别为支点,知道各力臂大小,分别利用杠杆平衡条件列出方程,联立方程组求出桶盖的重,再利用重力公式求桶盖的质量.
解答:
解:
设脚对A点的作用力为F,顶杆对B点的作用力为F$_1$,顶杆对桶盖上C点的作用力为F$_2$,根据杠杆平衡条件有:
F×AO$_1$=F$_1$×O$_1$B…①
G×DO$_2$=F$_2$×CO$_2$…②
F$_1$=F$_2$,
$\frac {①}{②}$得:
$\frac {F×AO$_1$}{G×DO$_2$}$=$\frac {O$_1$B}{CO$_2$}$,
即:$\frac {21N×24cm}{G×35cm}$=$\frac {18cm}{5cm}$
解得G=4N;
m=$\frac {G}{g}$=$\frac {4N}{10N/kg}$=0.4kg.
答:桶盖的质量为0.4kg.
点评:
该题考查了学生对物理模型的抽象、分析能力,确定两杠杆的力和力臂的大小是本题的关键.